Olex kan tilknyttes trålposisjoneringssystemer av type Simrad ITI og GEONET IxSea.
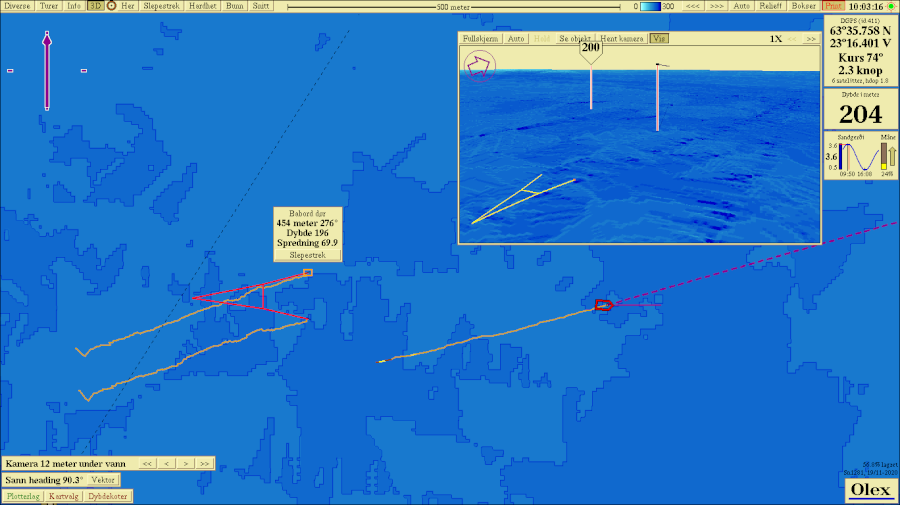
Sensorer som festes på trålen visualiserer trålen i 2D og 3D med avstand til skipet, retning, slepestrek og dørspredning.
Sensorene gir signaler til Olex, som viser trålens plassering som et symbol som slepes etter skipet.
Olex utvidet med ITI-nøkkel, kan tilknyttes forskjellige system for trål og ROV-posisjonering.
Trålen visualiseres i 2D og 3D på Olex-skjermen, med avstand, retning og dørspredning.
Det er også mulig å følge hver dør med en slepestrek.
ROV-posisjonering med NMEA $PSIMSSB
NMEA-meldingen $PSIMSSB finnes i flere varianter. De som blir forstått av Olex, inneholder en peiling fra båt til ROV. Andre vil gi formatfeil.
Apparatet som lager meldingen, må vite båtens sanne heading. Meldingen skal ha minst 10 felter, adskilte med komma. Felt 1 er et tidspunkt.
Felt 2 er et navn på ROV-målet. Felt 3 skal være "A". Felt 4 skal være tomt. Felt 5 skal være "C".
Felt 6 skal være enten "N", "E" eller "H". Felt 7 skal være et tegn, det er ikke viktig hvilket.
Feltene 8 og 9 er antall meter i horisontalplanet fra båt til ROV. Felt 10 er antall meter vertikalt fra båt ned til ROV.
Her er et eksempel på en riktig $PSIMSSB-melding, som beskrevet ovenfor:
$PSIMSSB,180554.432,M44,A,,C,N,M,-61.300,39.017,34.026,0.072,T,0.050576,*47
Om felt 6 er "H", må også meldingen $PSIMSNS komme på samme serieport som $PSIMSSB, for å overbringe båtens heading.
Under er et eksempel på $PSIMSSB som *ikke* virker, og som vil gi formatfeil:
$PSIMSSB,170800.82,B01,A,,U,E,M,329643.883,6596305.382,-0.977, 0.0,N,,*43
Feilen er at felt 5 er "U", som betyr at meldingen gir en absolutt posisjon i UTM istedenfor en relativ peiling.